Client: Max Dean (Artist)
Project: The Table, 2001
Description:
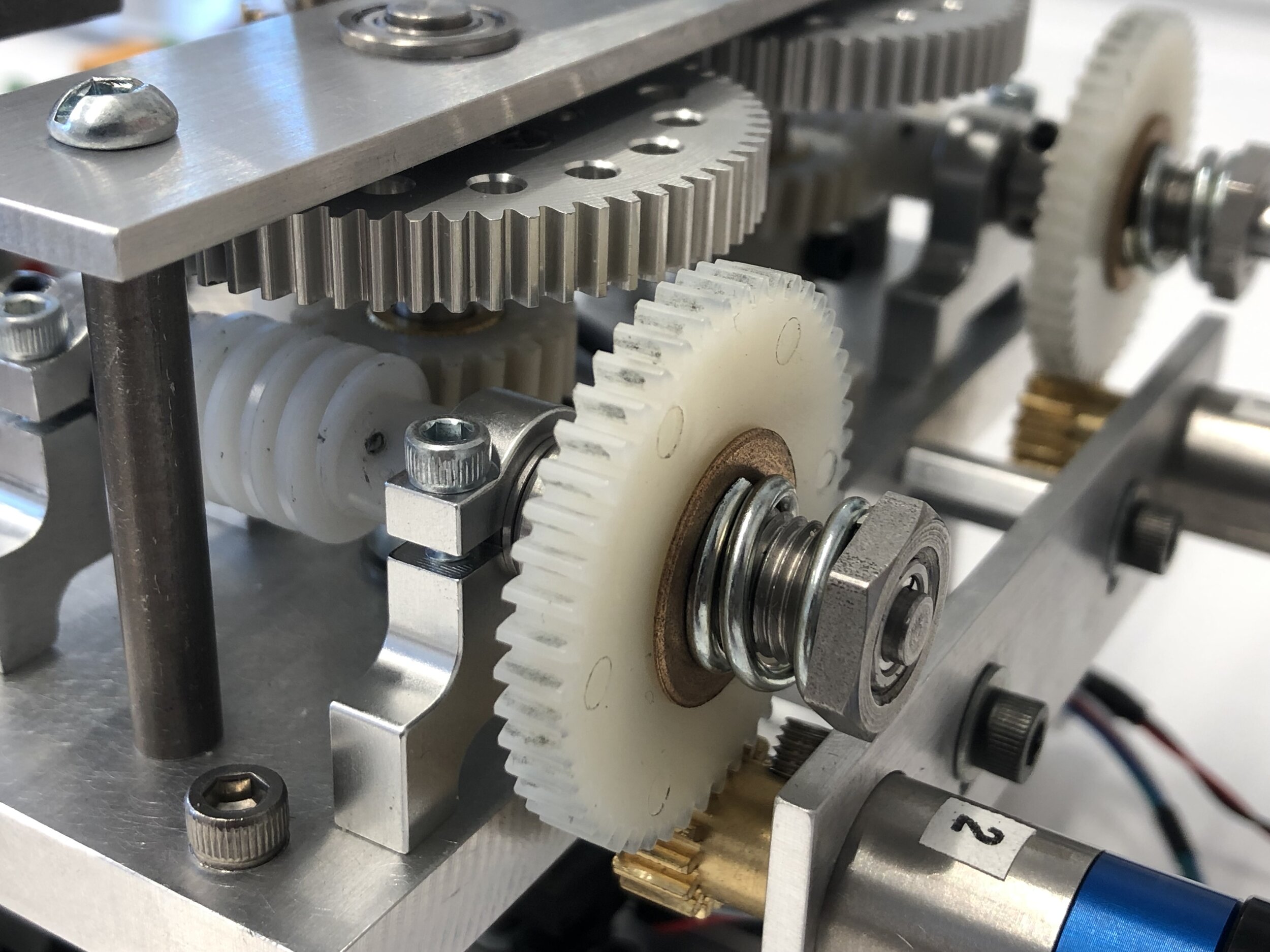
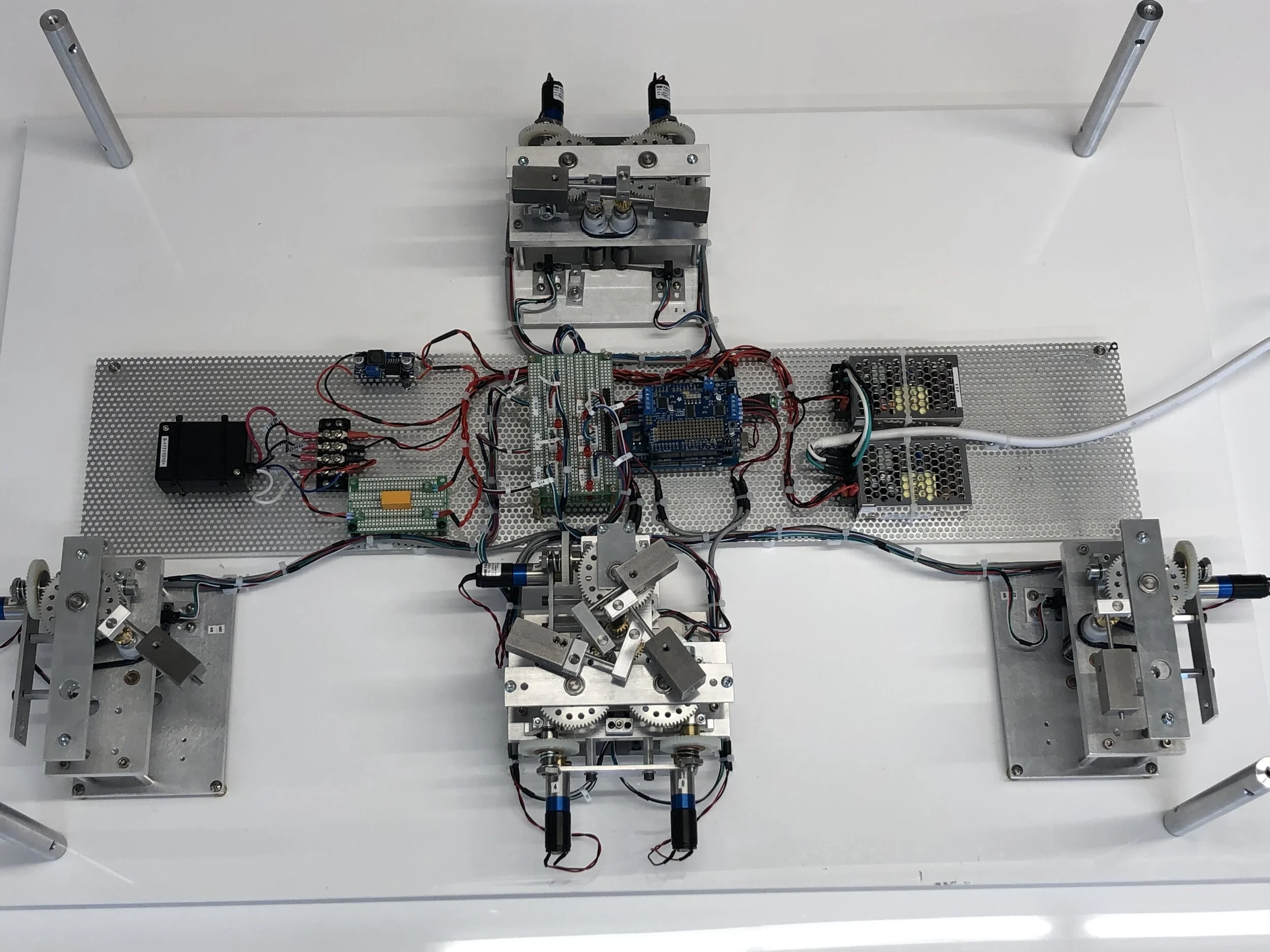
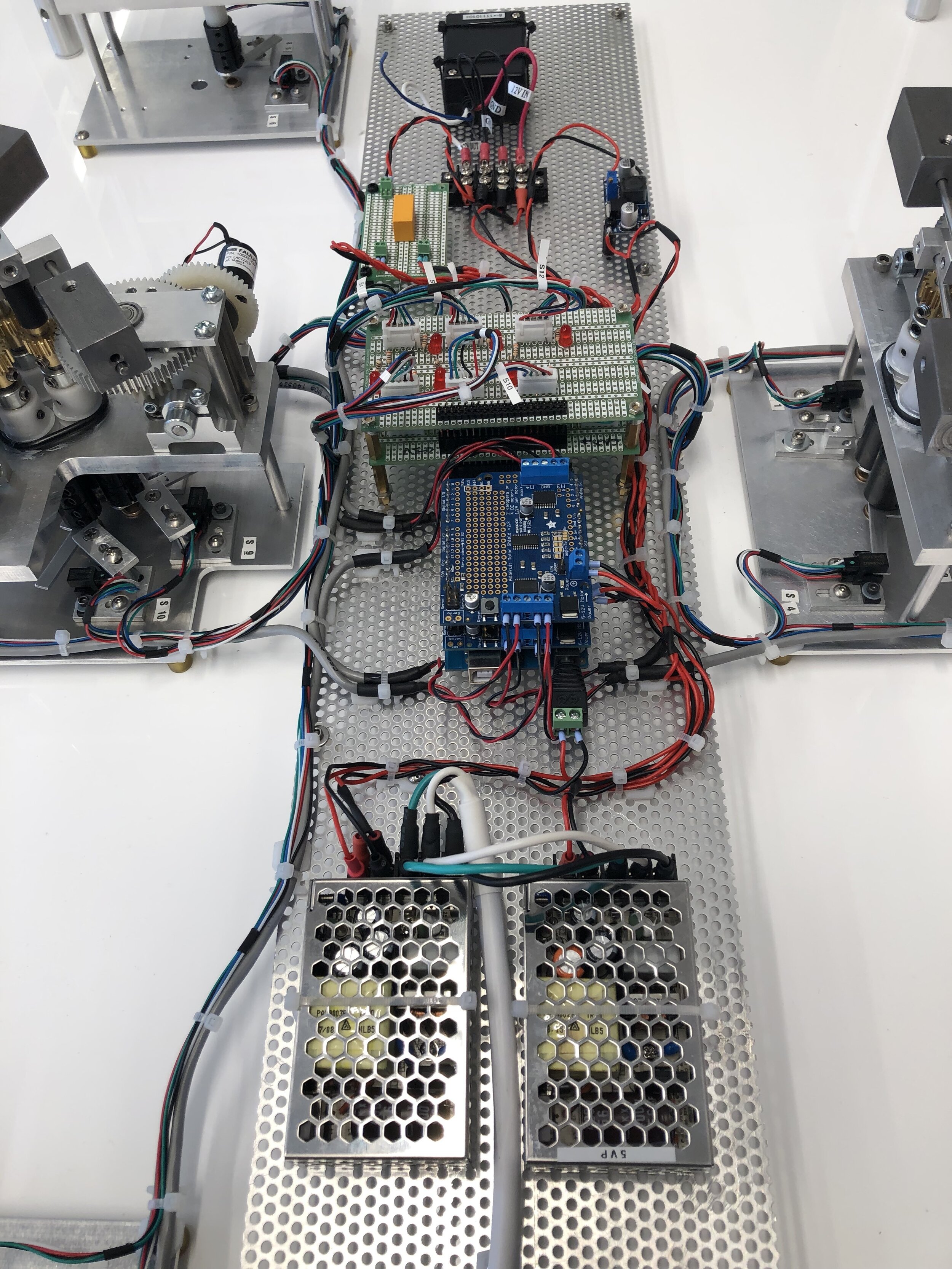
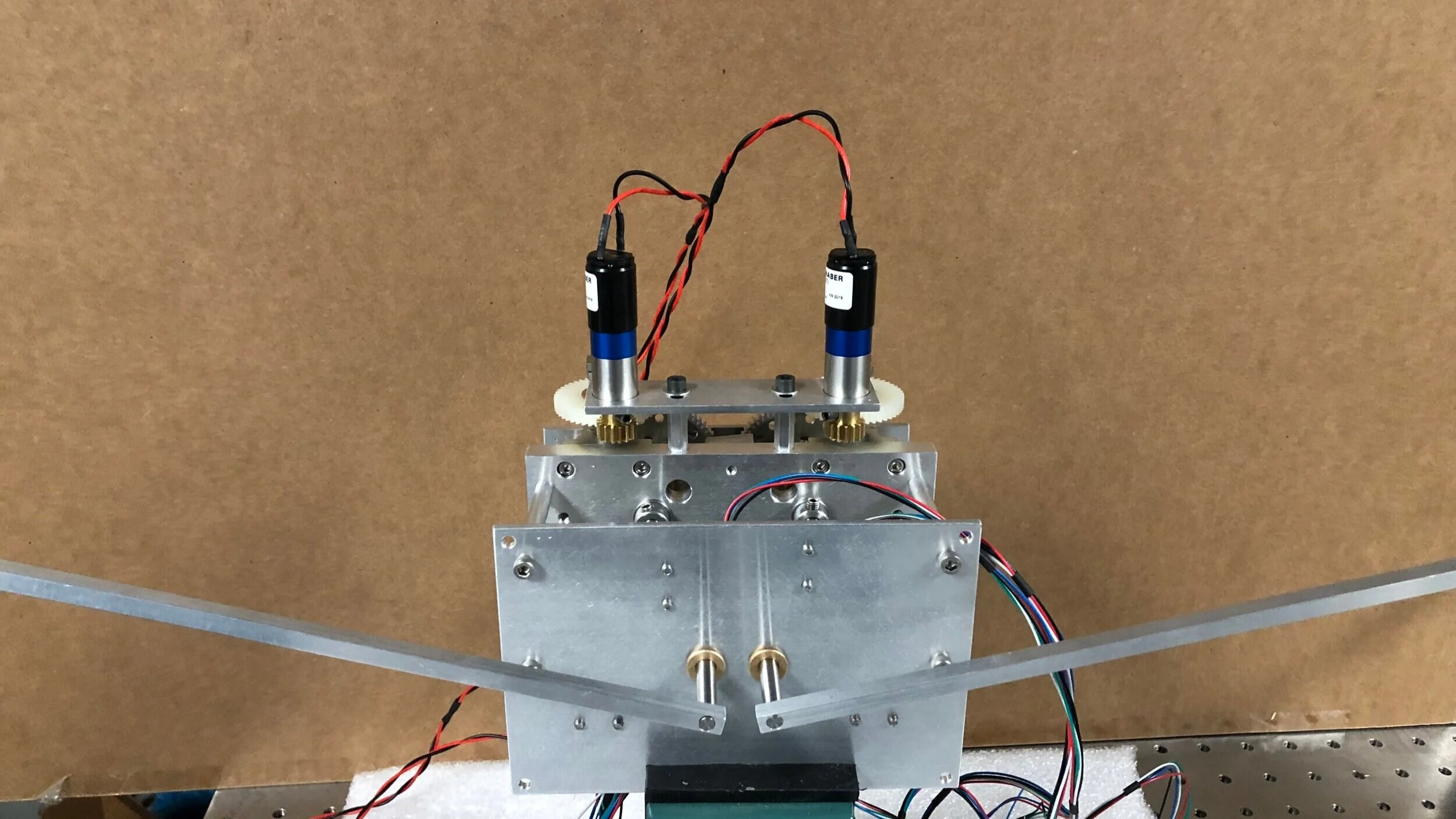
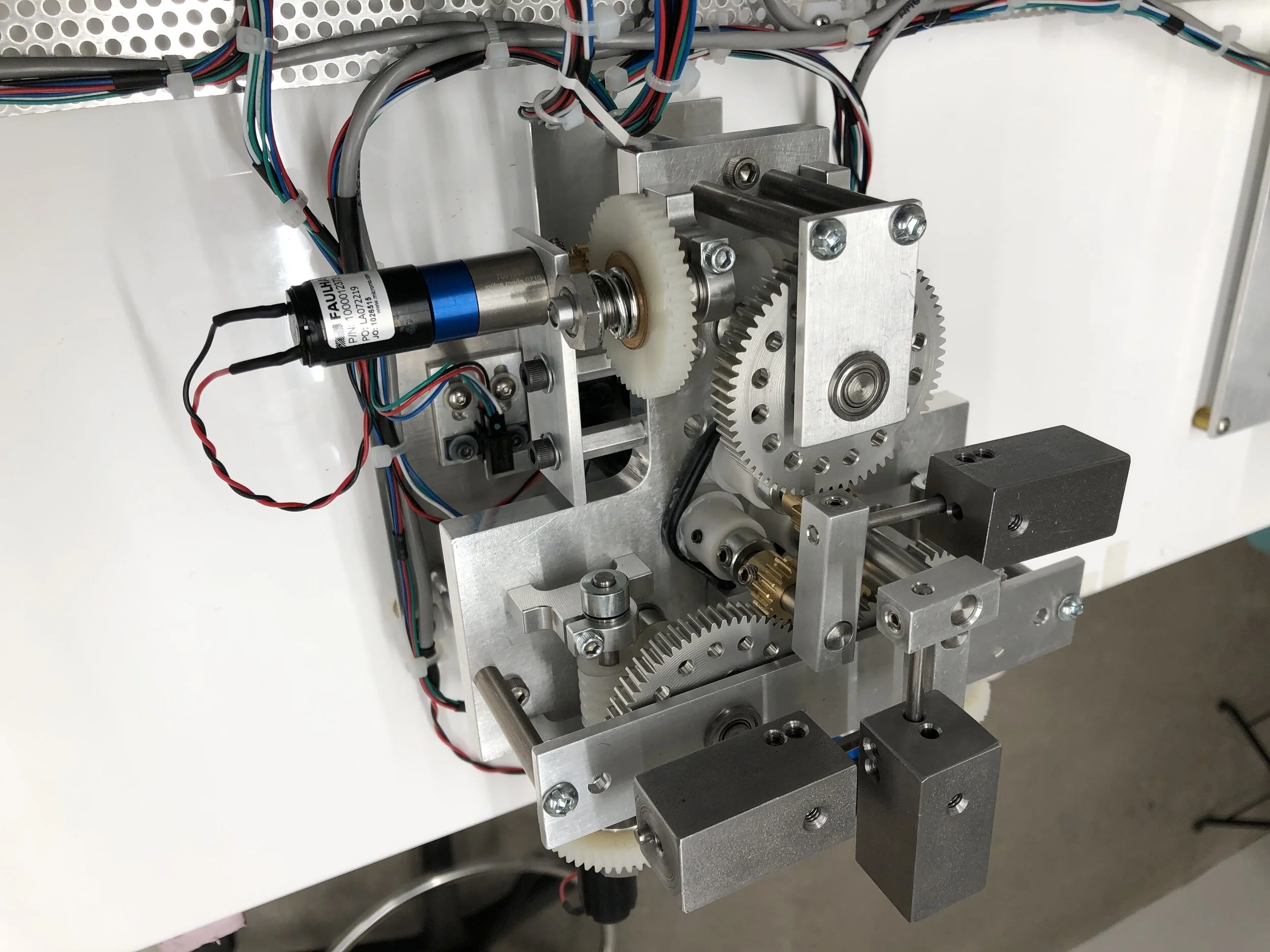
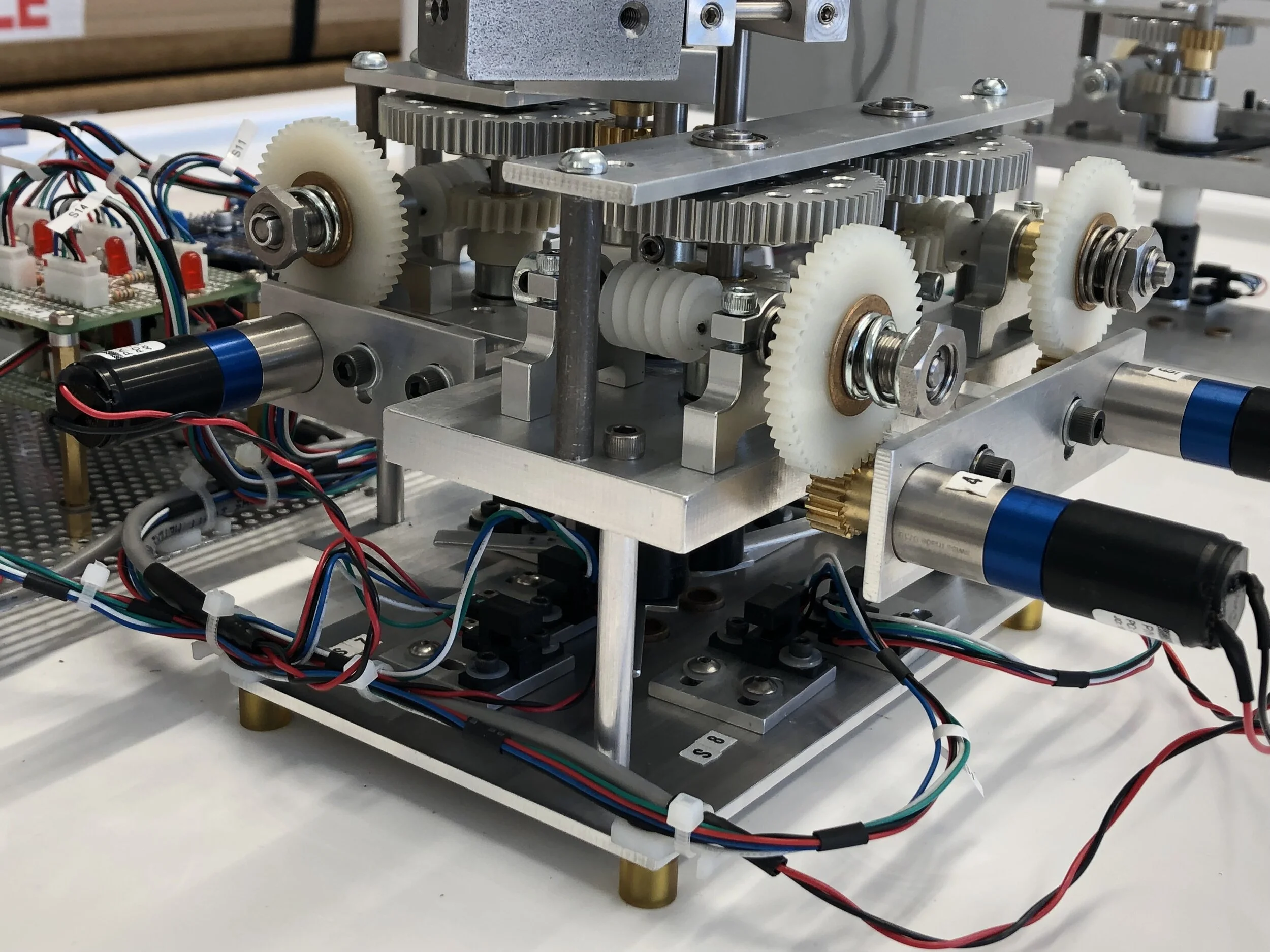
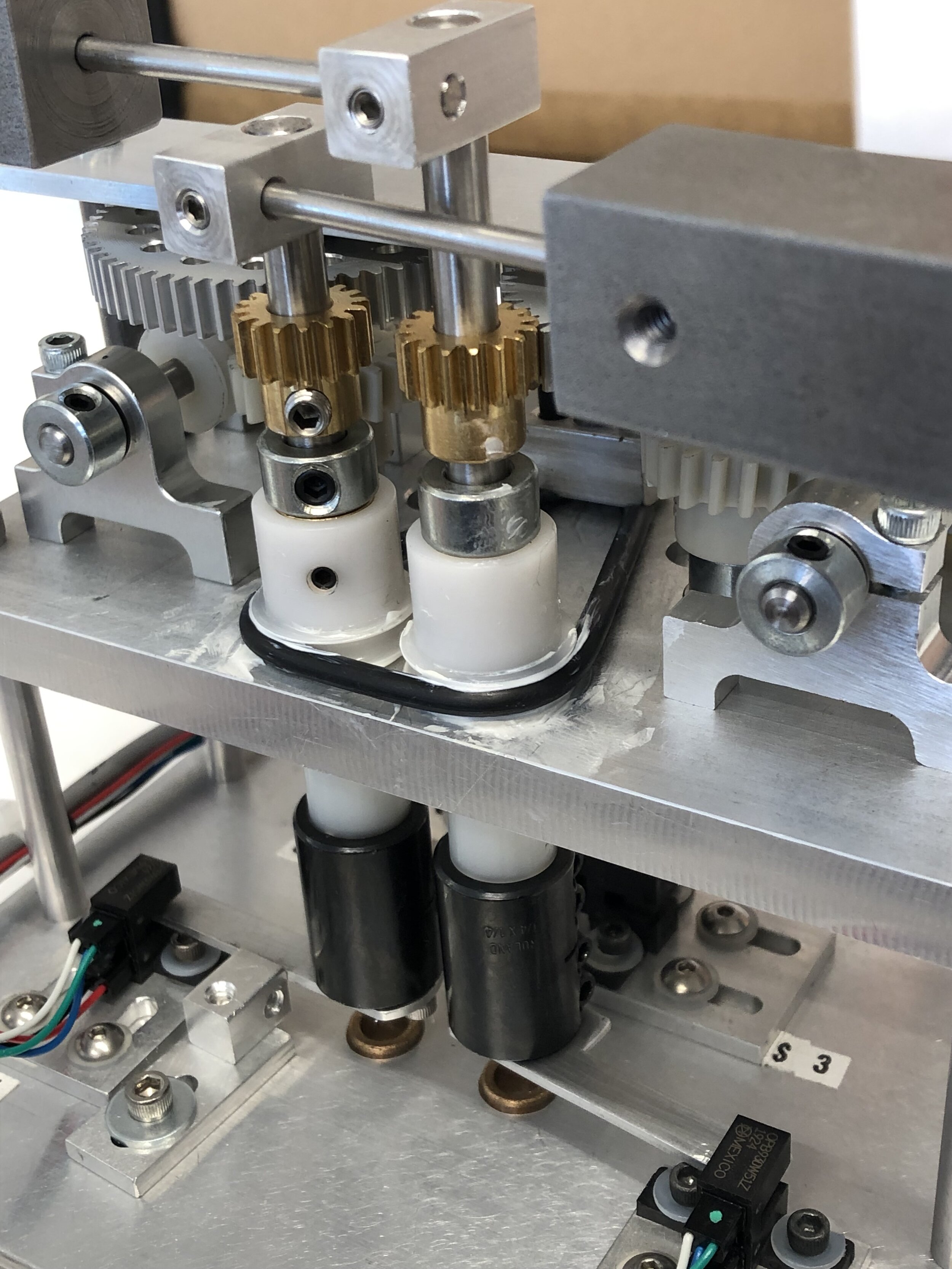
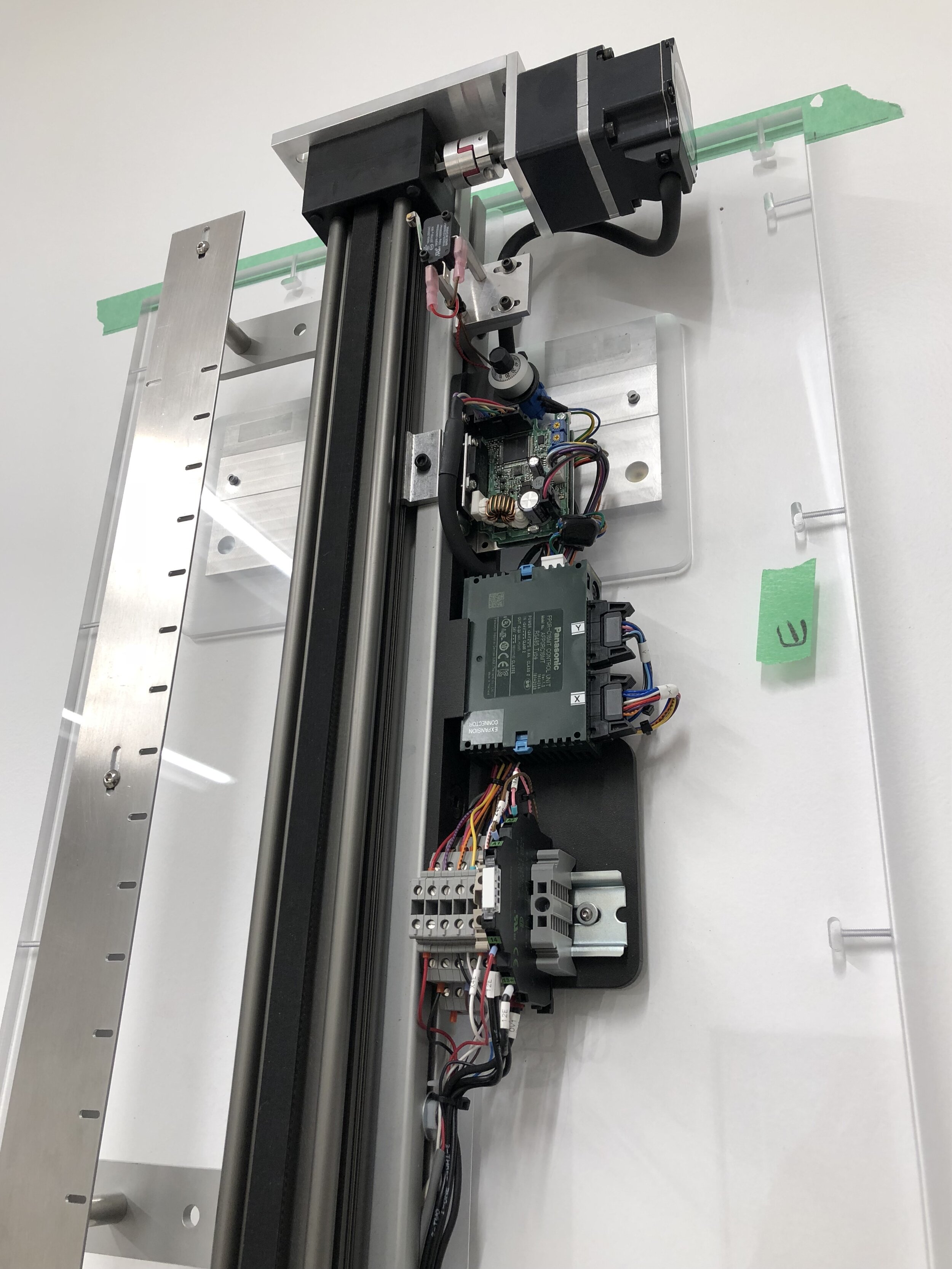
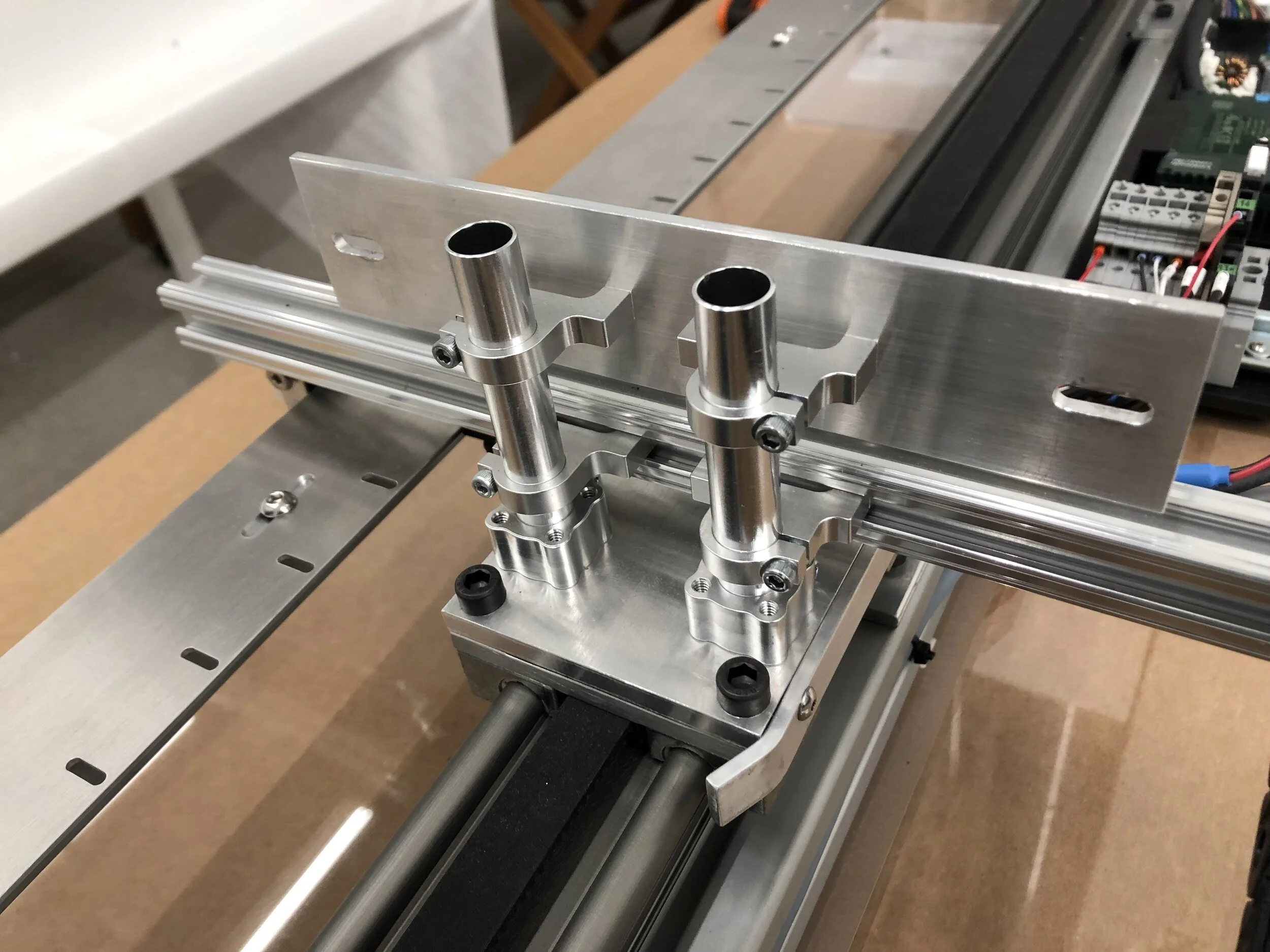
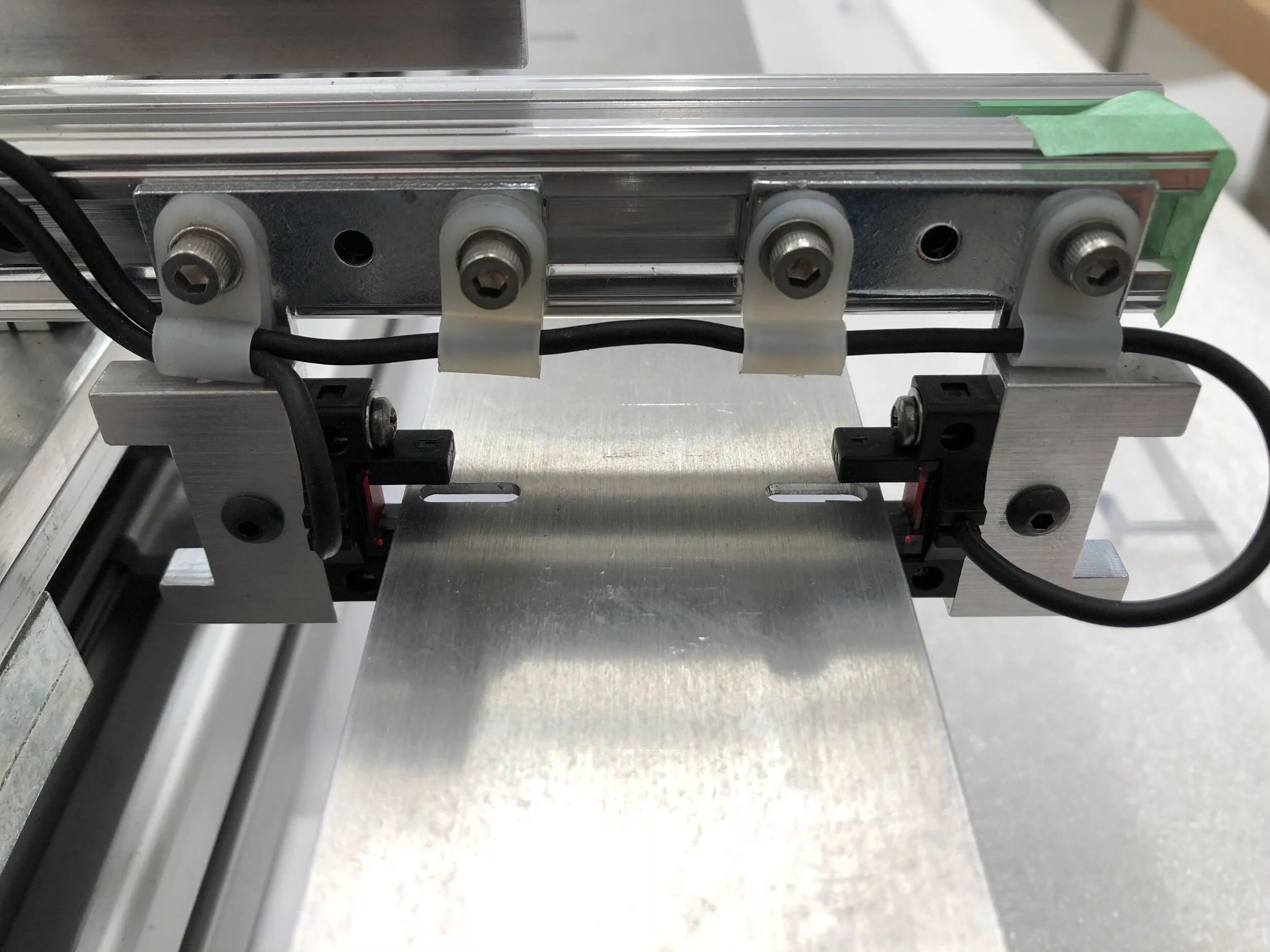
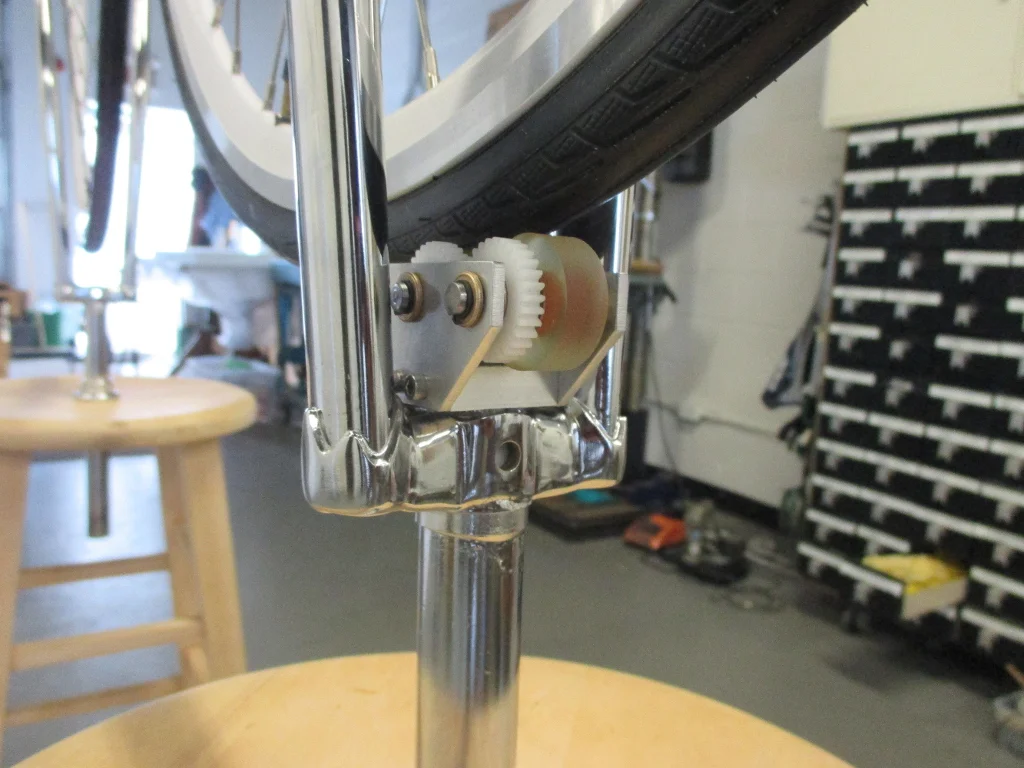
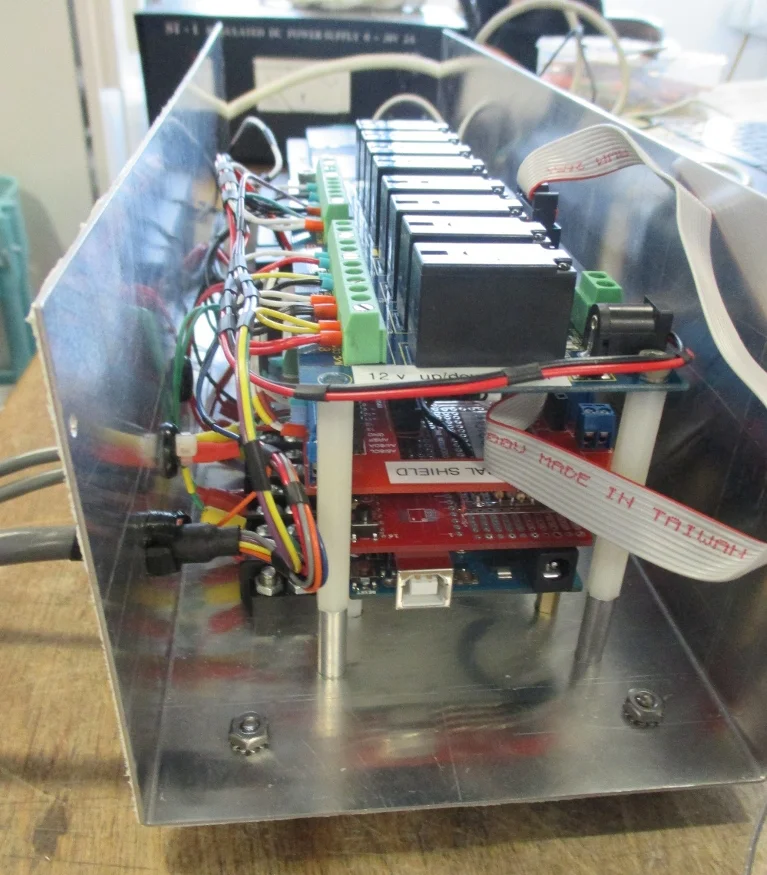
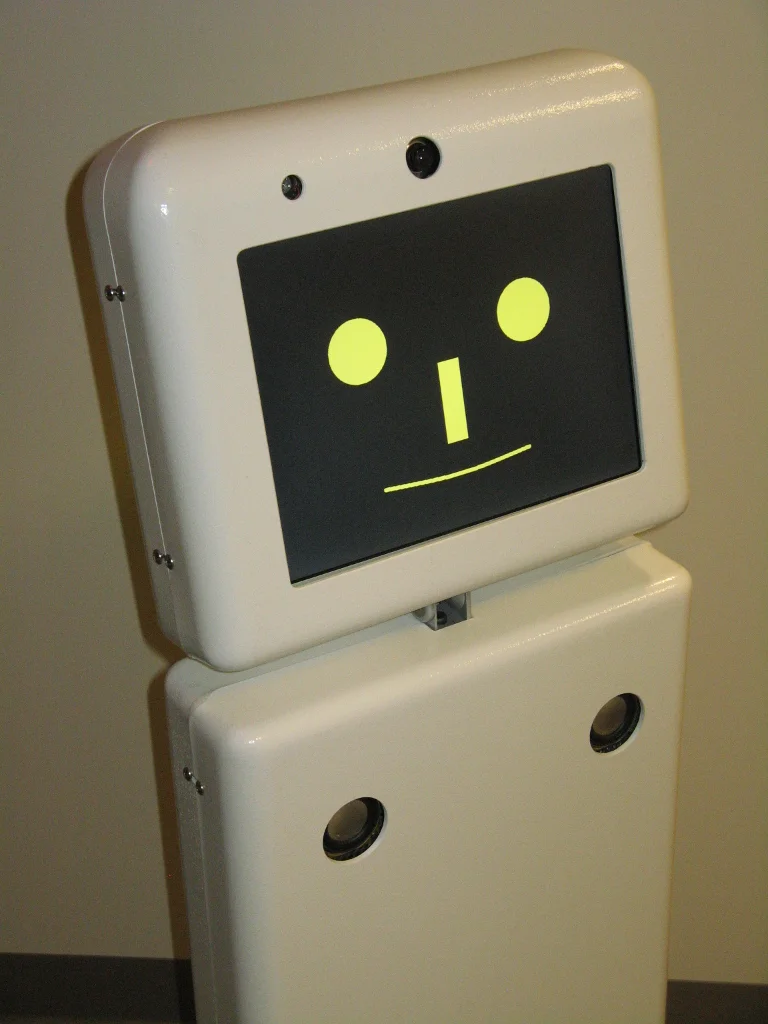
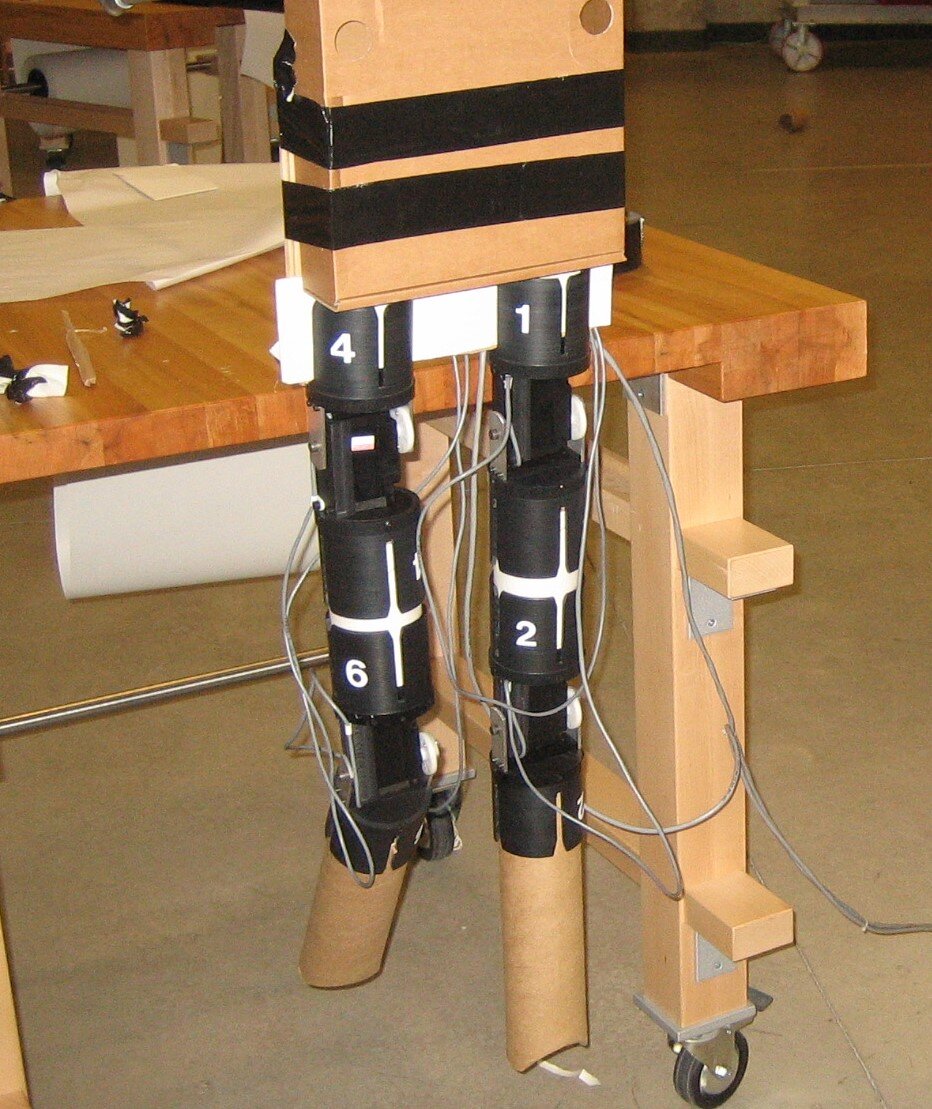
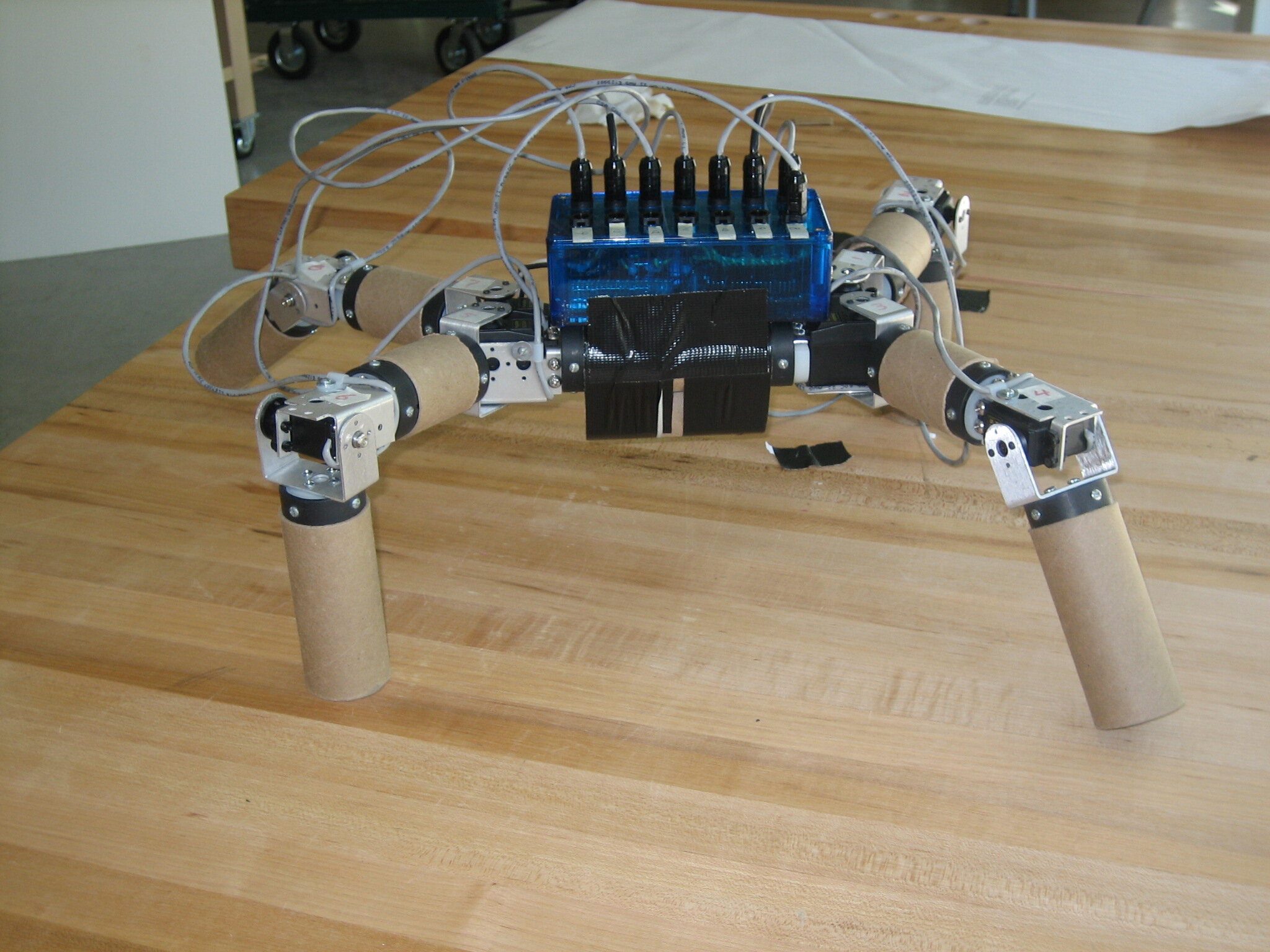
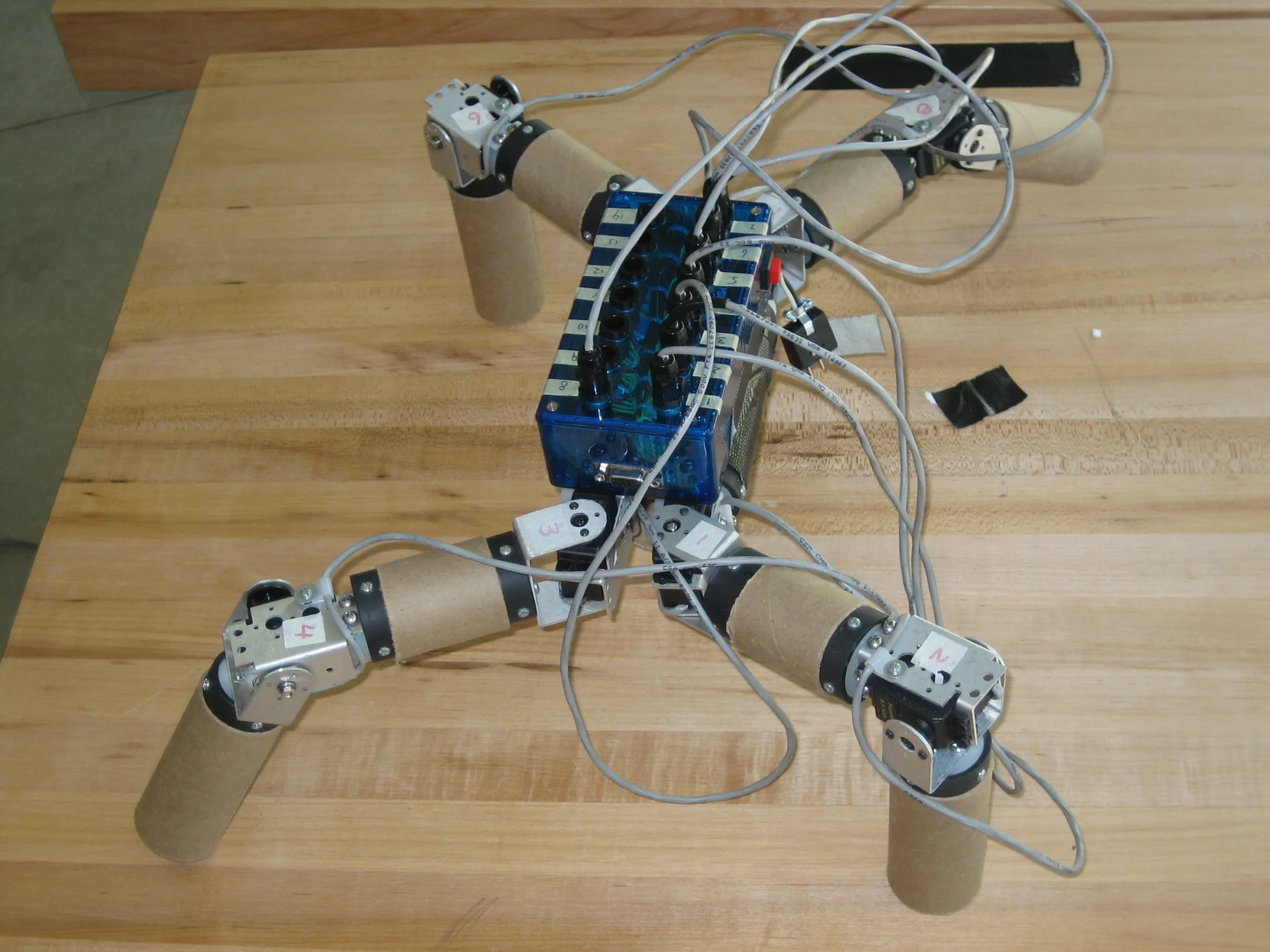
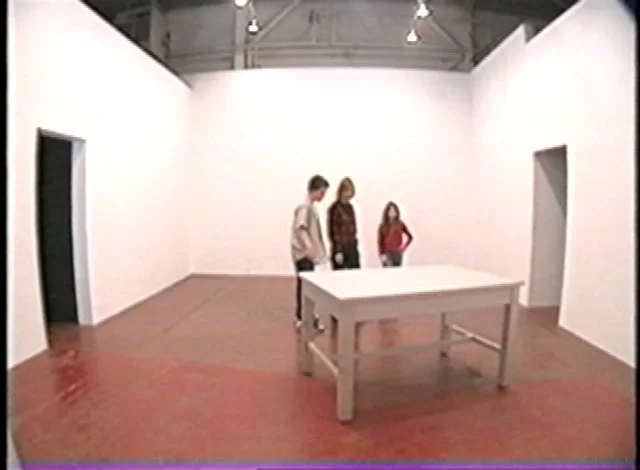
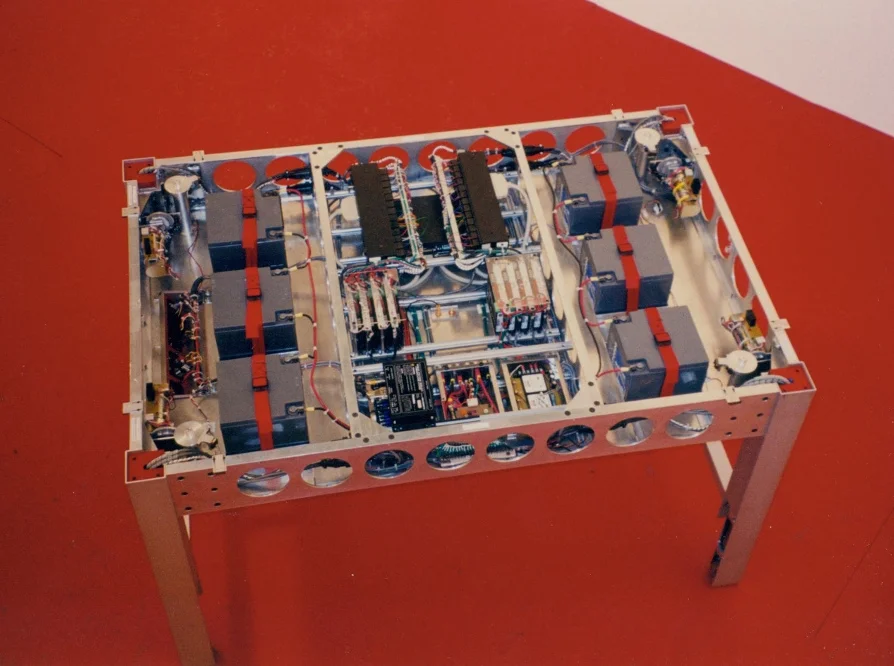
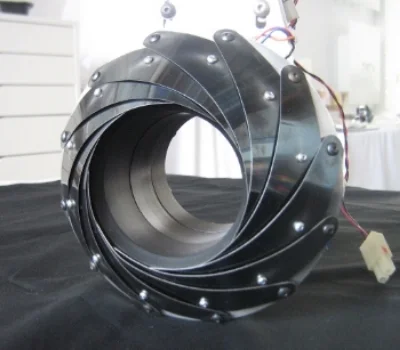
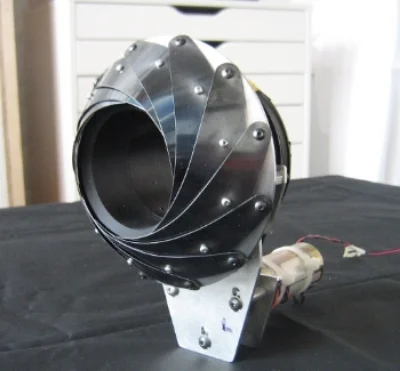
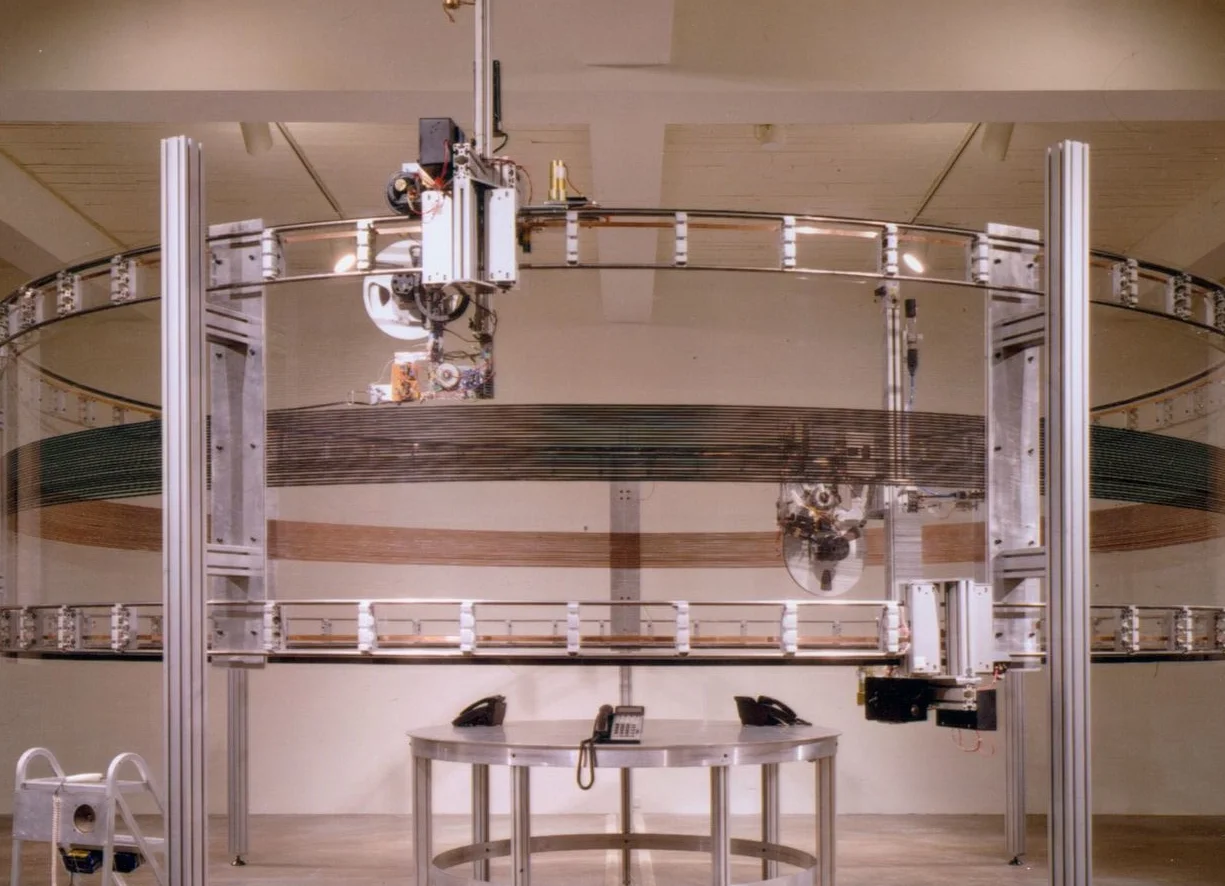
The Table is a fully autonomous, omni directional robot designed to select a viewer at random in an attempt to engage with them. A ceiling mounted camera connected to a concealed computer detects the presence of a person in the space. The Table's software interprets the person's physical movement as an invitation to engage with it. After which, that person will become the object of the Table's affections, to the exclusion of every one else in the room. Once a person is selected The Table will remain with them for the duration of their stay in the space. The high level commands generated by the control software are sent to the Table's controller via a radio modem. The on-board controller uses those commands to drive the Table's motors. In the Table (version 1) each leg has two motors, one for driving and one for steering. The 4 drive assemblies concealed at the bottom of each leg are synchronized and can rotate 360 degrees, allowing the Table to move in any direction.
Version 1:
Concept: Max Dean
Software Development: Rafello D'Andrea
Mechanical Design: Colin Harry
Electrical Design and assembly: Colin Harry, Dennis Pollock
Machining, parts fabrication: Colin Harry, Mat Donovan, Alexander Laverick
Version 2
Concept: Max Dean
Software Development: Rafello D'Andrea
Mechanical Design: Matt Donovan
Electrical Design and assembly: Colin Harry
Machining, parts fabrication: Matt Donovan
For additional information regarding Max Dean:
https://www.bulgergallery.com/artists/66-max-dean/overview/
For additional information regarding Raffaello D'andrea:
http://raffaello.name/